优化模块
scipy.optimize是SciPy中负责优化的子模块,这里介绍其三个主要功能:
- 最小二乘优化和曲线拟合。
- 无约束的优化。
- 方程求根。
import numpy as npfrom matplotlib import pyplot as plt多项式拟合
多项式拟合(Polynomial Curve-Fitting)用n阶多项式描述数据点(x,y)的关系。
多项式拟合的目的是找到一组系数,使得拟合得到的曲线与真实数据点之间的距离最小。
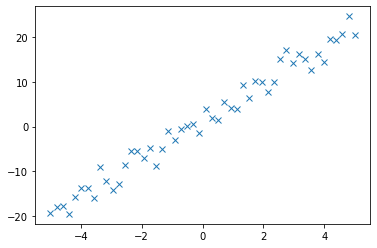
例如,考虑这样的一组数据:
x = np.linspace(-5, 5, 50)y = 4 * x + 1.5y_noise = y + np.random.randn(50) * 2plt.plot(x, y_noise, "x")[]
拟合与插值不同,拟合不要求得到的曲线经过所有的数据点。
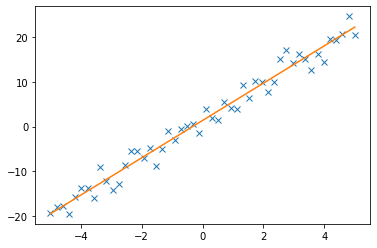
多项式拟合的系数可以使用NumPy模块的np.polyfit()函数来得到:
coeff = np.polyfit(x, y_noise, 1)coeffarray([4.17438706, 1.35630552])plt.plot(x, y_noise, "x", x, coeff[0] * x + coeff[1])[,
]
多项式函数还可以通过函数np.ploy1d()生成:
f = np.poly1d(coeff)fpoly1d([4.17438706, 1.35630552])print(f)4.174 x + 1.356生成的多项式对象支持数学运算得到新的多项式:
print(f ** 2 + 2+ f + 3) 2
17.43 x + 15.5 x + 8.196考虑更复杂的拟合:
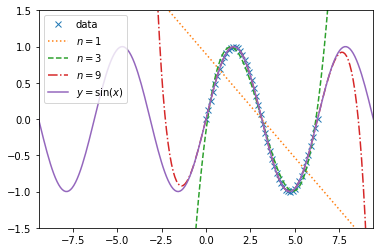
x = np.linspace(0, np.pi * 2)y = np.sin(x)分别使用1阶,3阶和9阶多项式对这组数据进行拟合:
f1 = np.poly1d(np.polyfit(x, y, 1))f3 = np.poly1d(np.polyfit(x, y, 3))f9 = np.poly1d(np.polyfit(x, y, 9))拟合曲线如下:
t = np.linspace(-3 * np.pi, 3 * np.pi, 200)plt.plot(x, y, "x",
t, f1(t), ":",
t, f3(t), "--",
t, f9(t), "-.",
t, np.sin(t)
)
plt.legend(["data", r"$n=1$", r"$n=3$", r"$n=9$", r"$y=\sin(x)$"])
plt.axis([-3 * np.pi, 3 * np.pi, -1.5, 1.5])(-9.42477796076938, 9.42477796076938, -1.5, 1.5)
最小二乘拟合:
from scipy import optimize定义一个关于x的函数,该函数有四个额外参数:
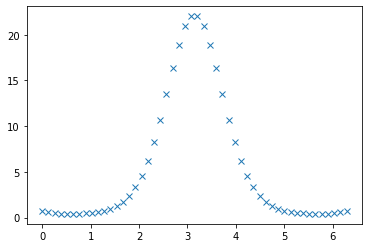
def my_f(x, a, b, w, t):
return a * np.exp(-b * np.sin(w * x + t)) 生成一组带噪声的数据:
x = np.linspace(0, 2 * np.pi)actual_parameters = [3, 2, 1.25, np.pi / 4]y = my_f(x, *actual_parameters)y_noise = y + 0.8 * np.random.randn(len(y))plt.plot(x, y, "x")[]
plt.plot(x, y_noise, "x")[]

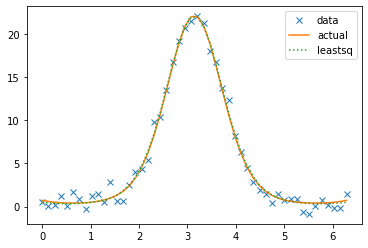
最小二乘法(Least Squares)是一种优化技术,它通过最小化误差的平方和来寻找一个与数据匹配的最佳函数。
为了使用最小二乘法,需要先定义一个误差函数:
def err_f(p, x, y):
return y - my_f(x, *p) 第一个参数p是要估计的真实参数,第二个参数x是数据的输入,第三个参数y是输入对应的数据值。
利用该函数可以进行最小二乘估计:
c, rv = optimize.leastsq(err_f, [1,1,1,1], args=(x, y_noise))找到最小二乘解时,rv返回1到4中的某个值,c返回找到的最小二乘估计:
carray([2.73620073, 2.08882198, 1.20078322, 0.93881627])rv1真实参数为:
actual_parameters[3, 2, 1.25, 0.7853981633974483]plt.plot(x, y_noise, "x",
x, y,
x, my_f(x, *c), ":")
plt.legend(["data", "actual", "leastsq"])
也可以不定义误差函数,用函数optimize.curve_fit()直接对my_f()的参数进行拟合:
p_est, err_est = optimize.curve_fit(my_f, x, y_noise)p_estarray([2.7362006 , 2.08882203, 1.20078321, 0.93881632])最值优化:
物理上斜抛运动的水平距离公式为:
def fly_dist(theta, v0):
g = 9.8
theta_rad = np.pi * theta / 180.
return v0 ** 2 / g * np.sin(2 * theta_rad) theta是采用度数进行衡量的,取值为0°到90°。v0是初始加速度。可以知道,在v0固定时,水平距离最大的角度是45°。
利用最小值优化函数optimize.minimize()可以得到这个结果。不过,为了获得最大值,首先要将最大值的问题转为求最小值的问题:
fly_dist_neg = lambda theta, v0: - fly_dist(theta, v0)设定初始猜测为10°,并将初速度v0通过额外参数传入:
res = optimize.minimize(fly_dist_neg, 10, args=(1,))res fun: -0.10204081529676719
hess_inv: array([[8179.23375443]])
jac: array([5.06639481e-07])
message: 'Optimization terminated successfully.'
nfev: 22
nit: 4
njev: 11
status: 0
success: True
x: array([45.00406995])res.xarray([45.00406995])方程求根
考虑这样的一个函数:
func = lambda x: x + np.cos(x)可以使用optimize.root()函数求这个函数为0的值:
sol = optimize.root(func, 0.3)sol.xarray([-0.73908513])sol.funarray([1.11022302e-16])optimize.root()函数还可以求解方程组:
func2 = lambda x: [x[0]*np.cos(x[1]) - 4, x[0]*x[1] - x[1] - 5]sol = optimize.root(func, [1, 1])sol.xarray([-0.73908513, -0.73908513])sol.funarray([-3.21964677e-15, 3.10862447e-15])